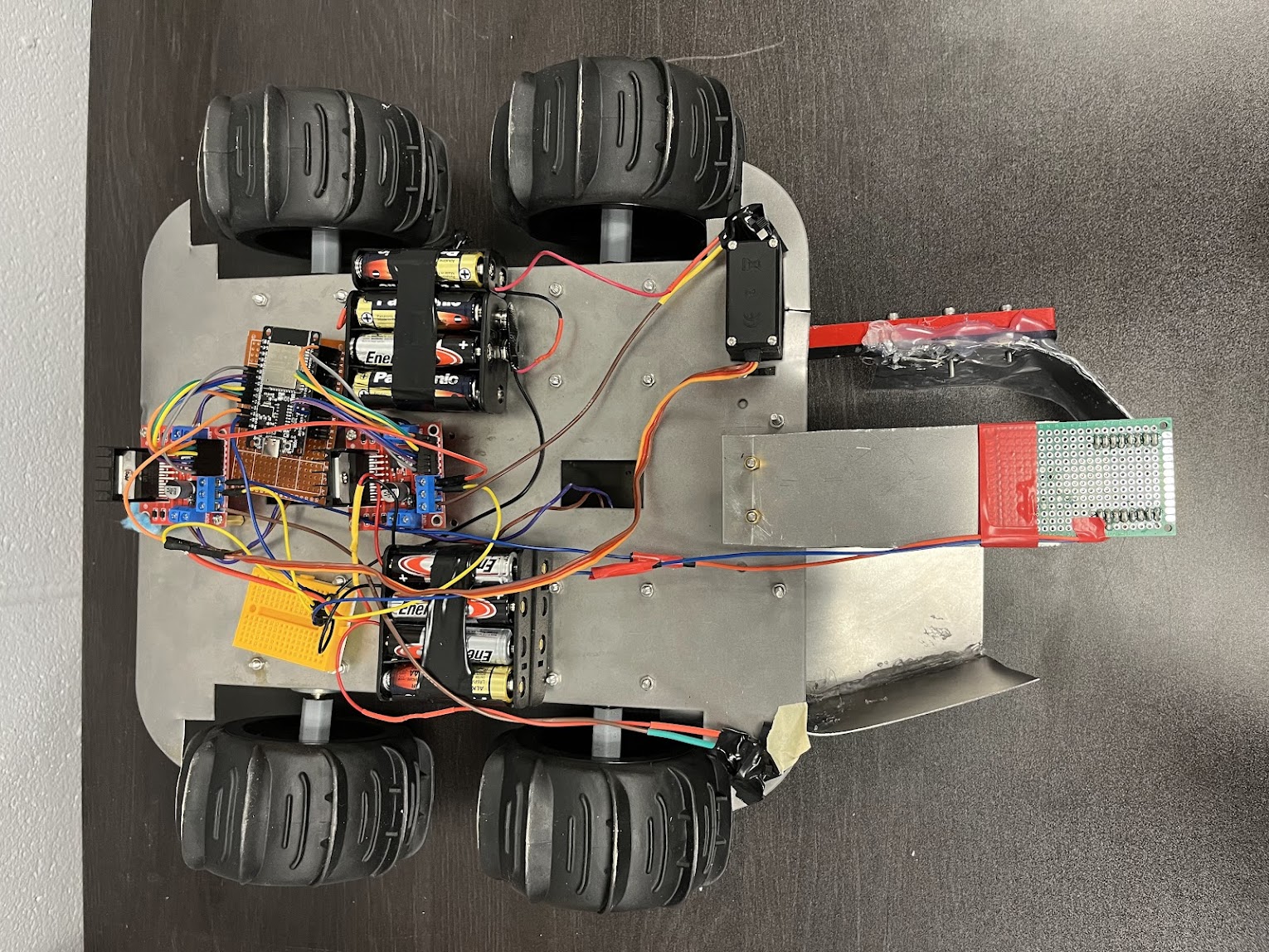
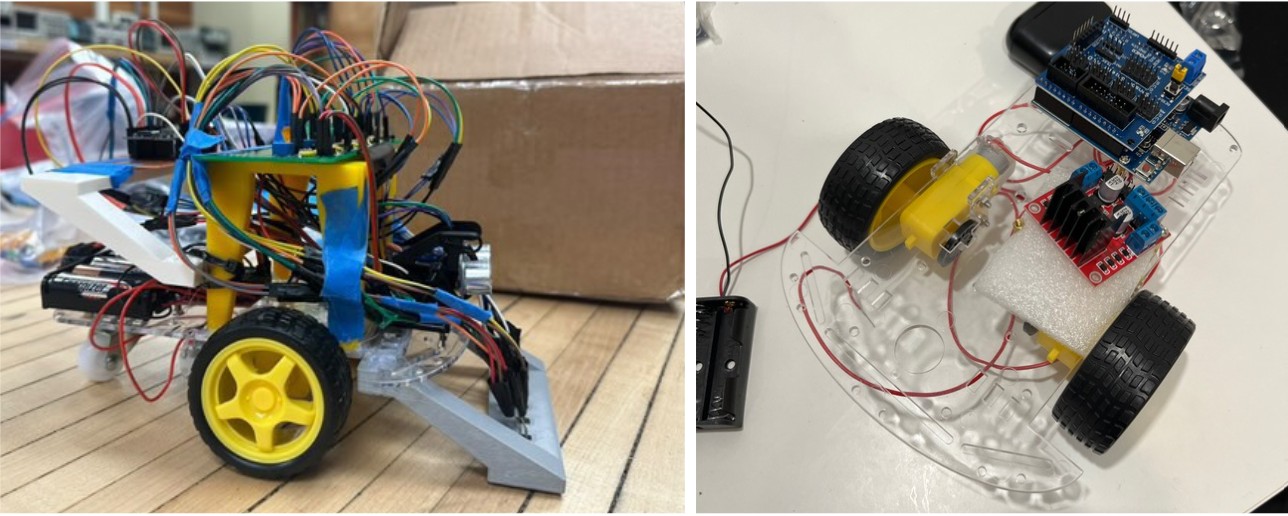
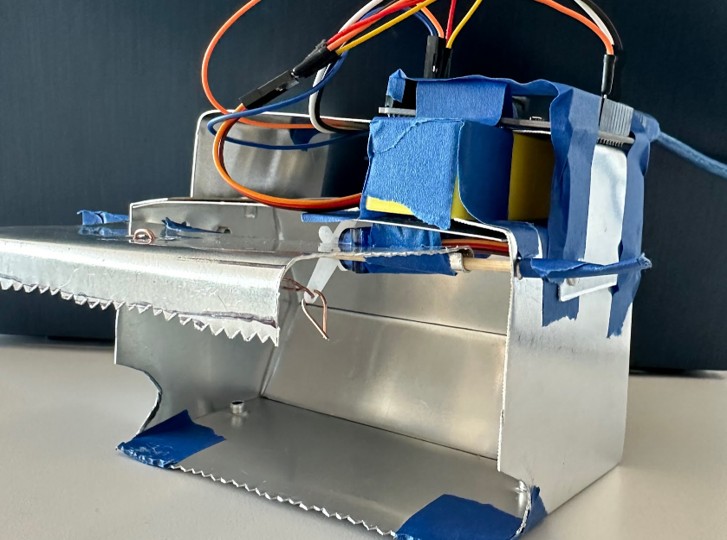
- Collaborated with multi-disciplinary team to build hardware and layout of electronic components
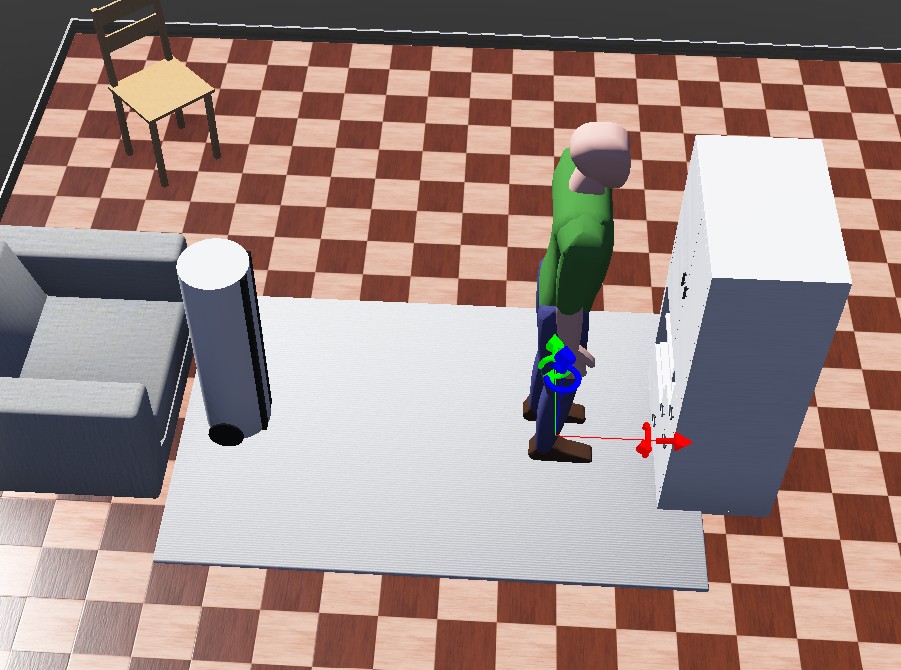
- Compiled a multi-staged program that navigated challenging paths riddled with obstacles
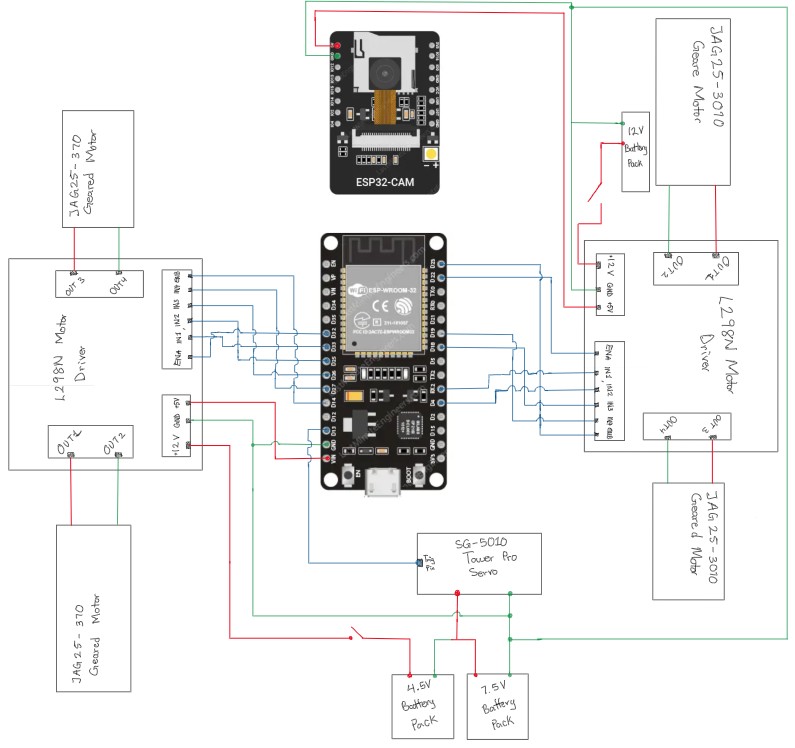
- Designed and tested circuit for optimal power conditions to increase operational efficiency by 24%
- Documented circuit schematic design decisions and recorded key findings during the design process